

In this build, I shall bring out all the steps in building a quadcopter from scratch.

The decisions required to decide upon the performance and expectations of a quadcopter are
Purpose/Why to build one ? What do you want to achieve?
Size of quadcopter
Time of Flight
Number of days/hours available to assemble
Sole purpose was to learn the basics and try my hands on making one. I wanted to make a decent size that can be man packed and easily operated by a single person to carry out surveillance of the intended area of operations in day and night. Minimum time of flight required was 15 minutes.
I had a month to work upon it and I started off in the highest of enthusiasm and spirits to launch it asap.
Skills required: Basic Electronics, Soldering, Assembling & lots of trial and errors.
Before I proceed ahead with the build, I shall list out all the important items required to assemble a quadcopter. All parts are available commercially off the shelf from an online store or from Shop no 595.596 from Lajpat Rai Market in Chandni Chowk. I source my parts both from online and offline stores.
Items required for Assembly
1. Flight Controller
2. Frame
3. ESC (Electronic Speed Controller)
4. BLDC Motors
5. Propellers
6. Remote Controller
7. PPM Encoder
8. Battery
9. GPS
10. Radio link
11.Vibration damping platform
12. Miscellaneous (Solder Station, Screw Drivers, Connectors, Heat Shrink Tubing, Wire Crimps, Nose Pliers, Wire Strippers)
Lets have a brief overview of all the above inventory items to start off with the build.
Flight Controller. It’s the brain of the quadcopter. You need it to control the flight with the help of an onboard stabilization mechanism using sensors , user inputs and algorithms. The flight controller measures the orientation and position of the device and adjusts the motor speed to keep it stable. The flight controller receives Pitch, roll, Yaw and Throttle from the Pilot and adjusts the motor speed accordingly to maintain stability. Another feature desired of a Flight Controller is to monitor the battery levels and maintain all Failsafe for the quadcopter safety.
Pixhawk is an open-source system used for unmanned aerial vehicles (UAVs) and other robotic applications. The Pixhawk system is popular among Hobbyists, researchers, and commercial UAV operators because of its flexibility, reliability, and ease of use.
I selected a Pixhawk for my project, the main features of which are:
Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- On-board sensors:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055 or ICM20602
- Magnetometer: IST8310
- Barometer: MS5611
- GPS: u-blox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310
- Interfaces:
- 8-16 PWM outputs (8 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- Dedicated S.Bus servo output
- 5 general purpose serial ports
- 3 I2C ports
- 4 SPI buses
- Up to 2 CANBuses for dual CAN with serial ESC
- Analog inputs for voltage / current of 2 batteries
- Power System:
- Power module output: 4.9~5.5V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 15.8g
- Dimensions: 44x84x12mm
- Other Characteristics:
- Operating temperature: -40 ~ 85°

Frame A suitable frame is of utmost importance for durability and performance of the quad. It is actually the backbone of your device, so the more rugged your frame is , the better will be the performance of the device. It houses all your circuitry, power distribution module and motors with additional sensors, battery and radio links.
There are four types of frames commonly used for construction of a drone which are essentially
A. H Frame
B. X Frame
C. Hybrid X Frame
D. Box Frame
Material – The most suitable and durable ones are made of carbon fiber. I purchased a commercial off the shelf available at robu.in.



ESC (Electronic Speed Controller) An opto coupled ESC is mandatory to control the speed of a quadcopter by isolating high power side from low signal side by transmitting the throttle from input to the output side of the ESC
ReadytoSky 40A 2-6 ESC was procured from www.robu.in which has a fast throttle response. It has good compatibility with 2-6s Lipo Battery.

BLDC Motors Pixhawk supports PWM, Oneshot, DShot ESCs, DroneCAN ESCs, PCA9685 ESC (via I2C), and some UART ESCs (from Yuneec) for receiving signals from pilot to control the BLDC motors running propellers. I used MT2204 2300KV BLDC for my build which was sourced from https://robu.in/product/brushless-motor-mt2204-2300kv

Propellers These are the wings of the quadcopter and high quality rigid propellers are a must for the stability and durability of the quadcopter. I used an Orange Carbon fiber propeller which has a 15° angle design at the end of the propeller to avoid whirlpool while the multi-copter is flying. There are two sets of propellers CW (Clockwise ) and CCW ( Counter Clockwise).

Remote Controller To control the quadcopter for its pitch, roll, yaw , throttle which ultimately will move the quadcopter up, down, left , right , forward, reverse we need a remote for the FPV operation. I selected a Flysky FS-i6S 2.4GHz 10CH AFHDS 2A RC Transmitter With FS-iA10B 10CH Receiver.
Using a drone is easy but controlling a drone is a tough job that’s why a transmitter is needed. You can’t fly a multirotor without it because it uses radio signals to send commands wirelessly to a Radio Receiver, which is connected to an aircraft or multirotor that is being remotely controlled. and Flysky is one of the popular brands that only manufactures a Diverse Range of high-quality Transmitters and Receivers at an affordable price
The Flysky FS-i6S 2.4GHz 10CH AFHDS 2A RC Touch Control Transmitter With FS-iA10B 2.4GHz 10CH Receiver constitutes a 10 channel 2.4GHz AFHDS 2A digital proportional computerized RC System.
Flysky Transmitter and Receiver is gaining so much popularity due to its originality and compatibility in high-end drone projects and Hobbyists are interested in this type of Transmitter.
- FS-i6S Transmitter:
- No. of Channel: 10
- Frequency Range: 2.4055 – 2.475GHz
- Band Width: 500KHz
- Band Number: 135
- Transmitting Power: <20dbm
- 2.4G Mode: AFHDS 2A
- Modulation System: GFSK
- FS-iA10B Receiver:
- No. of Channel: 10
- Frequency Range: 2.4055 – 2.475GHz
- Band Number: 140
- Receiver Sensitivity: -105dbm
- 2.4G Mode: AFHDS 2A
- Modulation System: GFSK
PPM – Pulse Position Modulation is an analogue signal, but instead of using a separate wire for each channel, PPM stacks each signal one after another to send them all along the same wire. This makes wiring your R/C Receiver to your autopilot much easier! Other variations of PPM include CPPM, and PPMsum which are slight variations introduced by specific manufacturers. Some autopilots such as the Pixhawk require a PPM (or SBUS) input so if you are using a PWM receiver you wil need to use a PPM encoder 2.4k which converts several PWM signals into a single PPM output.
The nice thing about PPM is that it will enable you to reduce all channels into a single wire.
Battery The Fuel for your quadcopter, the better the fuel, the better the performance. Now, performance can be measured by the flight time and the output consistency. I used an orange 8000Mah battery for my quadcopter. Orange 8000mAh 4S Lithium polymer battery Pack (LiPo) batteries are equipped with heavy-duty discharge leads to minimize resistance and sustain high current loads. These batteries have to stand up to the punishing extremes of aerobatic flight .
GPS Readytosky Ublox NEO-M8N High Precision GPS Module has Built-in Compass for Pixhawk Flight Controller with onboard Compass, low power consumption, and high precision, the ultimate accuracy is 0.6 meters, actually almost 0.9 meters, greater than the previous versions.
It includes an HMC5883L digital compass.
Vibration damping platform. To give stability to the quadcopter, we need to mount the Pixhawk or any flight controller on a very very stable , vibration absorption platform to give stability to its onboard MEMS sensors which are sensitive to vibrations, which in the case if not ensured, can lead to disastrous results of reduced efficiency, crashing increased wear and tear and instability. I found one at makestore.in and the results proved for themselves.

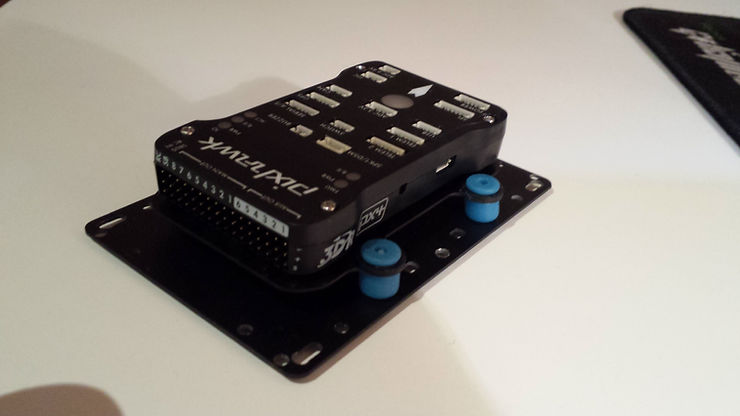

This platform ensures a super stable Pixhawk for a stable flight.
Miscellaneous These are some basic assembly tools that will be essential for this built. Make sure to collect them for a seamless integration.

Putting it All Together Lets assemble it all together.
Orientation. Almost all Flight Controllers have a heading mark arrow (shown below). The controller should be placed on the frame top-side up, oriented so that the arrow points towards the front of the vehicle (on all aircraft frames – airplane, multirotor, VTOL, ground vehicles etc.)

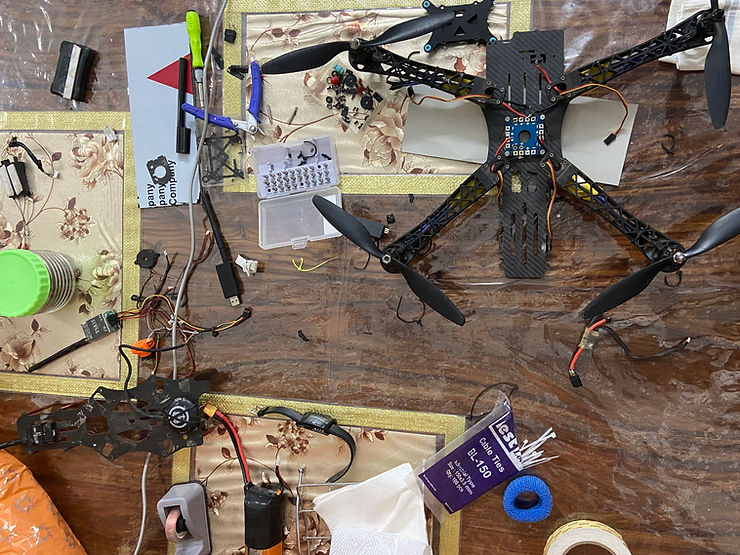
Some images of my build are here, video coming soon.

Assembly in progress. After hit and trial and changing about 3-4 frames, I was able to finally decide for this one for better stability and sturdiness.

Mounting PixHawk 4 after frame assembly.


Calibration under progress with Mission Planner.

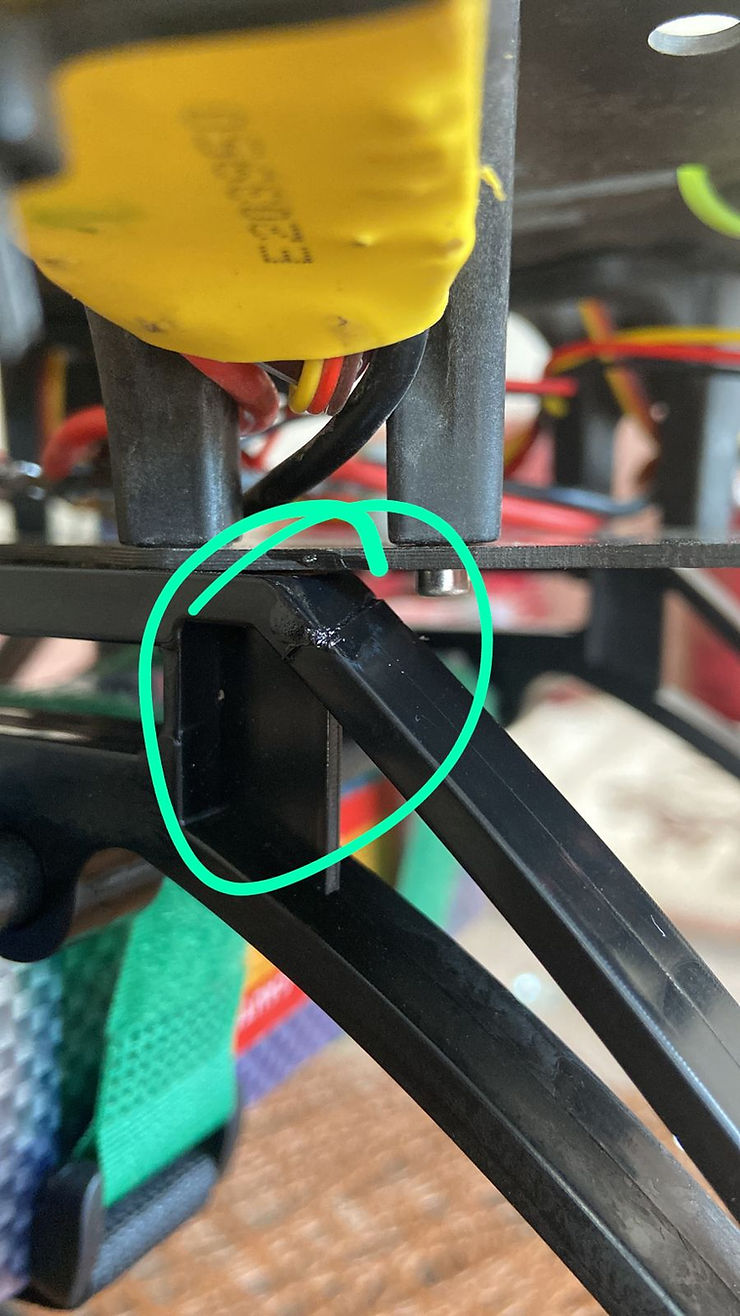
The landing gear broke on first trial, thus had to work out a via media, therefore I used an old cloth hanger to make a diy landing gear.

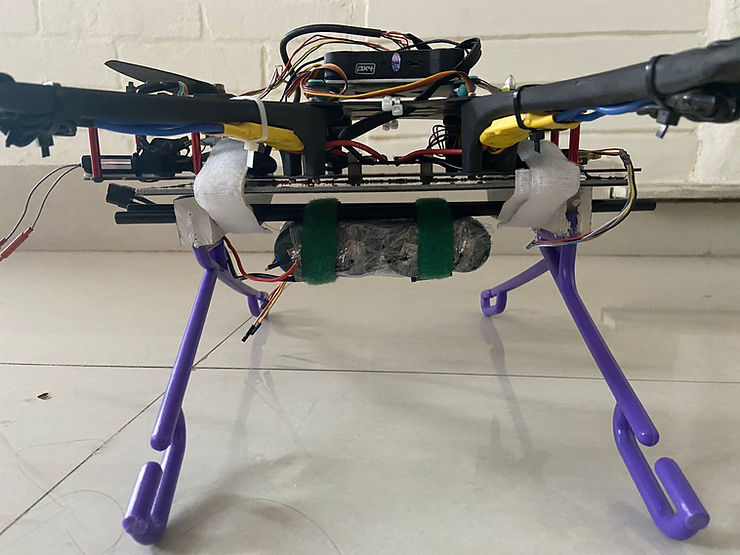
Quadcopter mounted on a diy landing gear.


Ready for another trial